| 概要 |
ATI碰撞传感器保护贵重的机器人工具
保护装置是ATI工业自动化公司专利技术的碰撞传感器,它设计用在机器人碰撞时对贵重末端执行器的保护。保护装置有以下特点:自动复位、高重复精度、大力矩转动、设计坚固并且成本低。
什么是机器人防碰撞传感器?
机器人的末端工具能在机器人或它的工具在发生碰撞时提前或同步检测到这个碰撞。与其它的保护设备一样,ATI的防碰撞传感器发送1个信号给机器人的控制柜,当机器人发生碰撞时会立即停止或者避免。机器人碰撞保护设备就是机器人防碰撞传感器,同时它也被认为是一种机器人过载保护装饰,快速停止装置,机器人安全法兰,或者机器人碰撞保护器。 |
|
| 优点 |
这个保护设备是ATI工业自动化的专利技术防碰撞传感器,当机器人发生碰撞时用来保护机器人末端工具免受损坏。这个保护设备的特性有:自动复位,高重复精度,大力矩扭转性能,结实的设计和低成本
自动的复位特性有助于工厂的安全。当机器人发生碰撞后,ATI的防碰撞传感器可以在机器人离开碰撞位置后自动复位,或者当扭转角度变得小于20-25°后。
在X,Y和Z轴上具备浮动量,相对于通过禁止进入机器人工作区域来说,这个能力可以提供一个更安全的办法
随着传感器的良好的角度方面的浮动性,还提供一个作为选配项的弹簧用来提供3个不同的跳变扭矩点。这个特性可以提供额外的浮动性。同时,可以提供一路气压来扩大扭矩能力以便满足需要更大惯性的运动需要。这个气压值也可以释放掉,仅仅让弹簧提供一个较低的惯性运动时的需要。
传感器的功能特性能很好的保护机器人和工具,具备很好的投资效益。同时,减少故障停机时间,降低人为干预的需要。
机器人防碰撞传感器特性
·高重复定位精度。 发生碰撞后,高精度的定位组件可以让传感器恢复到原来的位置,误差小于0.001英寸
·常用的运动范围 在碰撞过程中,传感器可以顺从于任何一个类型的碰撞(角度、轴向、扭转),让机器人有足够的时间采取修正行动
·结实的轴向浮动设计 传感器在设计和制造上非常结实可靠,部件的设计采取高强钢,所以有时也被用来作为一个浮动装置来保护机器人末端执行工具。它可以为大多数应用提供角度和扭矩方向的浮动。
·能量吸收 在发生碰撞过程中,传感器可以吸收能量,用来保护设备。这些能量将伴随着碰撞移除过程而重新释放出来。
·静态的跳变反馈 在一个给力的独立的压力下,不管是角度、轴向还是扭转方向的碰撞,其跳变点反应都是恒定的。
·柔性的安装面设计 通孔设计提供更大的柔性安装面
·自动复位 在发生碰撞后,当机器人把工具搬运离开碰撞点后,传感器能自动复位
·可增加弹簧这个选项,提供了2个跳变点 施加一路压缩空气时一般用来得到一个较高的跳变点,用来检测一个较高惯性的运动。当不施加压缩空气,仅仅利用增加弹簧这个选项,可以用来检测一个较低的惯性运动的跳变点
·快速的碰撞侦测时效 2根线的闭路可以配置成常开或常闭,直流或交流。轴向的0.02英寸的运动都能被触发。一个常用的接头用来传输碰撞信号。
·现场可重新组装式设计。
·现场模块化可替换接头。
·IP65外壳保护等级(此项需增加额外的成本) |
| 如何选择碰撞传感器 |
一个成功的应用,要选择尺寸合适的碰撞传感器。选碰撞传感器的时候要考虑工件重量,机器人运动造成的惯性载荷,工件在工作过程中产生的载荷。一旦这些都计算好了,就可以确定传感器型号了,同时也可以确定跳变点的设定压力 。跳变点设定的压力最好是可调的。例如,计算的设定压力是50psi,调压范围应该是25-75psi。
选择过程如下:
1.计算出来的实际负载
通过图1,能够将力转换成末端执行工具施加到碰撞传感器上的合力矩,转矩,以及轴向负载。利用图1的曲线和下面的公式来计算差的情况下的负载。所有三个量-轴向负载,转矩和剪切力矩-都应该考虑其动态的,静态的,以及合力的作用情况。
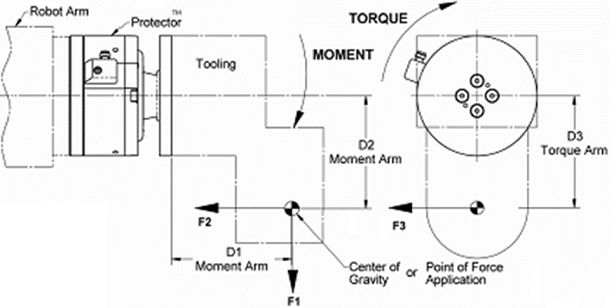
说明:不是所有的分作用力(静态的,动态的,和工作的)在机器人作业的整个过程中都会出现。结果就是,轴向,转矩,剪切力矩最差的情况会在机器人程序的不同时间段出现。
公式:
轴向负载(F)=F2
转矩(T)= F3*D3
力矩(M)=√( (F1*D1)2 + (F2*D2)2 )
(F1,F2,F3为各自动态,静态和分作用力的合力;计算跳变压力时必须考虑。)
a. 静态力:机器人手臂静止时,工具重量施加的载荷。这包含连接到传感器上所有部件的总重,沿着重力的方向作用在重心位置。
b. 动态力:由于机器人手臂加速,会在工具重心位置增加惯性力。这个力作用方向与运动方向相反。动态力和静态力叠加,必须加以考虑来保证选择合适的碰撞传感器。
c. 工作力:正常工作的情况下,在工具的边沿产生的作用力。如果这些力的大小和作用点已知,就可以用同样地技巧将其转换成对碰撞传感器的载荷。
2.选择碰撞传感器型号:
通过步骤1确定近似的负载后,选择动态和静态力矩和转矩都要大于计算值的碰撞传感器。
3. 获得需要设定的压力
对一个负载已知的既定型号的碰撞传感器,可以通过下面的公式计算设定压力:
P = PM + PT + PF
这里用PM,PT,PF分别表示剪切力矩,转矩和轴向载荷在跳变点时的期望值。用下面表格中的公式计算PM,PT和PF,这里的M,T,F指的是跳变点时的期望值。
表2:传感器设定压力计算
(公制单位:N-m,Bar,N)
| 型号 |
力矩 |
转矩 |
轴 |
| SR-48 |
(M x 1.0874) - 0.5 |
(T x 0.9267) - 0.2 |
F x 0.01435 |
| SR-61 |
(M x 0.2294) - 0.2 |
(T x 0.2708) - 0.4 |
F x 0.00719 |
| SR-81 |
(M x 0.1052) |
(T x 0.1027) - 0.1 |
F x 0.00361 |
| SR-82 |
(M x 0.1052) |
(T x 0.1027) - 0.1 |
F x 0.00361 |
| SR-101 |
(M x 0.0517) |
(T x 0.0495) - 0.2 |
F x 0.00228 |
| SR-131 |
(M x 0.0183) |
(T x 0.0199) - 0.1 |
F x 0.00132 |
| SR-176 |
(M x 0.0077) |
(T x 0.0075) - 0.2 |
F x 0.00070 |
| SR-221 |
(M x 0.0032) |
(T x 0.0040) + 0.5 |
F x 0.00045 |
例子: SR-81承受100 lb-in的剪切力矩,50 lb-in转矩和20lbs的轴向负载,加速度为2G时,压力计算如下:
P = ((100*0.172) - 0.2) + ((50*0.168) - 0.8) + (20*0.233) + ((100*2*0.172) - 0.2)
= 17 + 7.6 + 4.66 + 34.2
= 63.46
标称气压需要设定在63psi |
| 技术数据 |
| 型号 |
角度位移 |
轴向位移 |
重量 |
跳变力矩 |
轴向跳变 |
| SR-48 |
13 |
5.1 mm |
0.249 kg |
2.3 Nm - 6 Nm |
440 N |
| SR-61 |
11 |
5.6 mm |
0.318 kg |
6.8 Nm - 28 Nm |
880 N |
| SR-81 |
13 |
8.6 mm |
0.581 kg |
14 Nm - 59 Nm |
1700 N |
| SR-82 |
13 |
8.6 mm |
0.581 kg |
14 Nm - 59 Nm |
1700 N |
| SR-101 |
12 |
10 mm |
1.18 kg |
27 Nm - 120 Nm |
2700 N |
| SR-131 |
10 |
12 mm |
2.31 kg |
76 Nm - 340 Nm |
4700 N |
| SR-176 |
10 |
16 mm |
5.44 kg |
180 Nm - 810 Nm |
8900 N |
| SR-221 |
8 |
16 mm |
11.4 kg |
440 Nm - 2000 Nm |
14000 N |
|
| |